Deep Learning
RF-DETR vs YOLO: Transformers in Computer Vision
April 24, 2026
14 min read

Object detection has undergone a series of architectural shifts over the past decade. Early approaches relied on two-stage detectors like Region-based Convolutional Neural Networks (RCNN), which separated region proposal from classification. One-stage detectors followed, trading some accuracy for significant speed gains. YOLO (You Only Look Once), which became the de facto standard one-stage detection model for real-time object detection ever since.
From YOLOv5 to YOLOv12 and beyond, each iteration focused on squeezing more performance out of a one-stage convolutional neural network (CNN) foundation. The improvements were real, incremental, and hard-won, pushing mean average precision (mAP) higher with each release while maintaining the low-latency inference that made YOLO practical.
RF-DETR represents a different approach entirely. Built on a transformer architecture, it moves away from the anchor-based, grid-level reasoning that defines YOLO while maintaining the key aspects of YOLO’s success:
RF-DETR isn’t faster or lighter than YOLO, but it is that RF-DETR is more accurate, easier to tune, and better positioned to scale. RF-DETR is built for what comes next.

NVIDIA DGX Station delivers data‑center‑class AI performance to a desktop workstation, empowering you to develop, train, and iterate on advanced AI workloads. Bring unprecedented compute power so you can accelerate innovation, scale experiments faster, and turn ideas into impact.
Get a Quote TodayUnderstanding why RF-DETR outperforms YOLO on accuracy requires looking at the architectural decisions that define each model. The performance gap is not incidental. It is a direct consequence of how each model reasons about an image.
YOLO is a one-stage detector. Rather than first proposing regions of interest and then classifying them, YOLO divides the input image into a grid and predicts bounding boxes and class probabilities directly from each cell in a single forward pass. This design is what makes it fast.
The tradeoff is in how the model reasons about spatial context. Each grid cell operates on a local receptive field, meaning the model makes predictions based on a limited region of the image rather than the full scene. In practice, this creates limitations in specific scenarios:
Each new YOLO version has worked to address these limitations incrementally, through better anchor designs, improved backbones, and architectural refinements. The progress has been real, but the constraints are baked into the foundational design.
RF-DETR is built on a transformer architecture and treats object detection as a set prediction problem. Rather than dividing the image into a grid and predicting from local regions, the model uses a set of learned object queries that attend to the entire image simultaneously through a global attention mechanism.
This has several meaningful consequences for how the model behaves:
The internals are more complex than a standard CNN-based detector. The attention mechanism is computationally heavier per operation, and the model requires more memory during training. However, the practical engineering overhead is lower because there are fewer heuristics to tune before the model produces reliable results. Modern GPUs are being equipped with more VRAM, making RF-DETR viable.
The architectural contrast translates directly into measurable accuracy differences, particularly in conditions where YOLO's local reasoning is at a disadvantage.
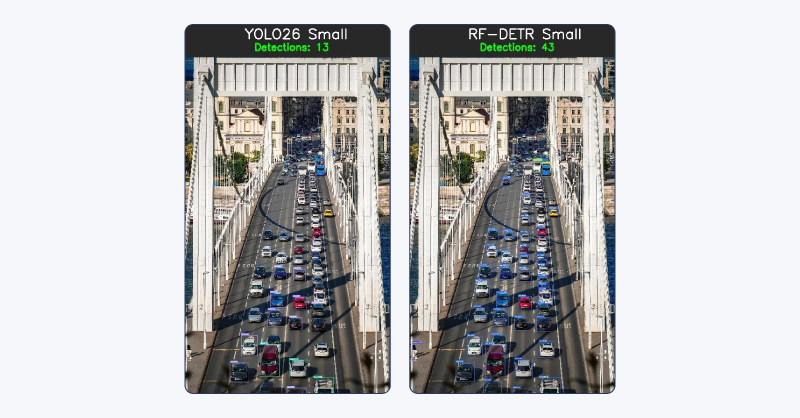
On standard benchmarks like COCO, RF-DETR models show meaningful mAP improvements over YOLO models at comparable parameter counts. For example, RF-DETR-B achieves higher mAP than YOLOv10-B and YOLOv12-B at similar model sizes, with the gap widening on the small object subset (AP-S) where local grid reasoning struggles most.
The specific scenarios where RF-DETR's global attention provides a clear advantage include:
| Feature | YOLO | RF-DETR |
|---|---|---|
| Architecture | CNN (one-stage) | Transformer |
| Anchor-based | Yes (most versions) | No |
| End-to-end training | No | Yes |
| NMS required | Yes | No |
| Reasoning scope | Local (grid-based) | Global (attention-based) |
| Small object performance | Moderate | Strong |
| Tuning complexity | High (anchors, NMS, thresholds) | Low (fewer heuristics) |
| COCO mAP | 55% Peak | 60.5% Peak |
The table makes the tradeoffs concrete. YOLO's design optimizes for speed and simplicity of inference at the cost of reasoning depth. RF-DETR's design optimizes for detection quality and training reproducibility, with inference efficiency and accuracy breaking through the 60% barrier.
RF-DETR is not without its own limitations:
YOLO's speed advantage is real in a narrow context. On CPU inference or highly constrained edge hardware, YOLO models remain competitive and in some configurations will outperform RF-DETR on raw latency. Outside of that context, the gap has closed considerably, consider the low power low-cost GPUs available. RF-DETR variants are now achieving latency figures that are competitive with YOLO at equivalent accuracy levels.
The more useful comparison is not raw speed but accuracy-per-FLOP, which measures how much detection quality a model delivers per unit of compute. On this metric, RF-DETR compares favorably, particularly as model size increases.
The perception that transformers are prohibitively expensive comes from the early days of models like the original DETR, which had slow convergence and high memory requirements. RF-DETR is not that model. Several architectural improvements have significantly reduced the computational cost of transformer-based detection:
The cost is not zero. Training RF-DETR requires more memory than training a comparable YOLO model, and the first deployment setup has a steeper learning curve for teams unfamiliar with transformer architectures. These are real tradeoffs. They are also manageable ones, and the trajectory is clearly toward lower cost over time.
This one requires a careful distinction. YOLO is not simpler to tune, but it does have a more familiar complexity. Deploying YOLO in production requires making deliberate decisions about:
RF-DETR on the other hand has no anchors to configure and no NMS thresholds to tune. The end-to-end training pipeline produces results that are more reproducible across runs and across teams. This does not mean RF-DETR is simpler to understand internally. The attention mechanism and transformer encoder-decoder structure are genuinely more complex under the hood. What it means is that the practical engineering effort required to get reliable results is lower, because there are fewer moving parts to calibrate.
For teams that have spent years building intuition around YOLO's quirks, the switch carries a learning curve. For teams starting fresh or scaling to new domains, RF-DETR's cleaner training interface is a meaningful advantage.
Benchmark numbers and architectural comparisons are useful, but the more important question is practical: where does the accuracy and design advantage of RF-DETR actually show up in production.
RF-DETR's global attention and end-to-end design translate into measurable real-world improvements. They are some of the most common and demanding object detection workloads in production today.
The common thread across these use cases is that they all prioritize detection consistency and accuracy over raw throughput. In production systems, a model that is slightly slower but significantly more reliable is almost always the better operational choice.
These systems require reliable detection of small and partially occluded objects, pedestrians at distance, cyclists partially hidden by vehicles, road signs obscured by weather or angle. Local grid reasoning struggles in exactly these conditions. RF-DETR's global context allows it to use surrounding scene information to localize objects that a YOLO model would miss or misclassify.
In safety-critical systems, that difference is not a marginal improvement, it is the difference between a reliable system and an unreliable one.
Dense shelf environments present a consistent challenge for local detectors. Products overlap, lighting is uneven, and object scales vary significantly within a single frame. RF-DETR handles crowded scenes more cleanly because object queries are designed to predict distinct instances independently, reducing the duplicate detections and missed items that plague grid-based models in these environments.
For a retailer running automated inventory checks across hundreds of locations, detection consistency directly affects operational accuracy. For autonomous warehouse robots, using detection software to locate asset tags to scan can use RF-DETR for the numerous CV tasks.
Robots operating in unstructured environments need to understand not just what objects are present, but how they relate to each other spatially. RF-DETR's attention mechanism builds a richer representation of the full scene, which supports more reliable grasping, navigation, and interaction decisions.
The consistency of RF-DETR's predictions across varied lighting, angles, and clutter is particularly valuable here, where a misdetection does not just affect a metric but causes a physical action to fail.
Object detection in medical imaging, whether identifying anomalies in radiology scans or detecting instruments in surgical video, demands high sensitivity on small and ambiguous targets. The global receptive field that RF-DETR operates with is well-suited to this domain, where local reasoning frequently misses subtle features that only make sense in the context of the surrounding tissue or anatomy.
Beyond current production use cases, the more consequential argument for RF-DETR is its scalability. Transformer-based models scale in ways that CNN-based models do not, and this has been demonstrated repeatedly across computer vision over the past several years.
RF-DETR also aligns directly with where the broader computer vision field is moving. Vision transformers are now the foundation for multimodal models, vision-language systems, and general-purpose perception pipelines. A team investing in RF-DETR today is building on an architecture that connects naturally to these adjacent developments.
The argument for RF-DETR is not that it wins on every individual metric today. On raw CPU latency at the smallest model sizes, YOLO is still competitive. The argument is that RF-DETR delivers better accuracy where accuracy matters most, requires less tuning overhead to achieve reliable results.
Object detection has always advanced by replacing good enough with better. Two-stage detectors gave way to one-stage detectors because better speed. One-stage detectors consolidated around YOLO because it struck the right balance of accuracy, speed, and practicality for the hardware and use cases of the time. That balance made YOLO the standard for over a decade, and it earned that position.
RF-DETR is the computer vision algorithm in the era of AI. Not because it wins on every metric in every context, but because the metrics it wins on are the ones that matter most, the systems and model architecture being built today.

Training AI models on massive datasets can be accelerated exponentially with the right system. It's not just a high-performance computer, but a tool to propel and accelerate your research.
Configure NowObject detection has undergone a series of architectural shifts over the past decade. Early approaches relied on two-stage detectors like Region-based Convolutional Neural Networks (RCNN), which separated region proposal from classification. One-stage detectors followed, trading some accuracy for significant speed gains. YOLO (You Only Look Once), which became the de facto standard one-stage detection model for real-time object detection ever since.
From YOLOv5 to YOLOv12 and beyond, each iteration focused on squeezing more performance out of a one-stage convolutional neural network (CNN) foundation. The improvements were real, incremental, and hard-won, pushing mean average precision (mAP) higher with each release while maintaining the low-latency inference that made YOLO practical.
RF-DETR represents a different approach entirely. Built on a transformer architecture, it moves away from the anchor-based, grid-level reasoning that defines YOLO while maintaining the key aspects of YOLO’s success:
RF-DETR isn’t faster or lighter than YOLO, but it is that RF-DETR is more accurate, easier to tune, and better positioned to scale. RF-DETR is built for what comes next.
NVIDIA DGX Station delivers data‑center‑class AI performance to a desktop workstation, empowering you to develop, train, and iterate on advanced AI workloads. Bring unprecedented compute power so you can accelerate innovation, scale experiments faster, and turn ideas into impact.
Get a Quote TodayUnderstanding why RF-DETR outperforms YOLO on accuracy requires looking at the architectural decisions that define each model. The performance gap is not incidental. It is a direct consequence of how each model reasons about an image.
YOLO is a one-stage detector. Rather than first proposing regions of interest and then classifying them, YOLO divides the input image into a grid and predicts bounding boxes and class probabilities directly from each cell in a single forward pass. This design is what makes it fast.
The tradeoff is in how the model reasons about spatial context. Each grid cell operates on a local receptive field, meaning the model makes predictions based on a limited region of the image rather than the full scene. In practice, this creates limitations in specific scenarios:
Each new YOLO version has worked to address these limitations incrementally, through better anchor designs, improved backbones, and architectural refinements. The progress has been real, but the constraints are baked into the foundational design.
RF-DETR is built on a transformer architecture and treats object detection as a set prediction problem. Rather than dividing the image into a grid and predicting from local regions, the model uses a set of learned object queries that attend to the entire image simultaneously through a global attention mechanism.
This has several meaningful consequences for how the model behaves:
The internals are more complex than a standard CNN-based detector. The attention mechanism is computationally heavier per operation, and the model requires more memory during training. However, the practical engineering overhead is lower because there are fewer heuristics to tune before the model produces reliable results. Modern GPUs are being equipped with more VRAM, making RF-DETR viable.
The architectural contrast translates directly into measurable accuracy differences, particularly in conditions where YOLO's local reasoning is at a disadvantage.
On standard benchmarks like COCO, RF-DETR models show meaningful mAP improvements over YOLO models at comparable parameter counts. For example, RF-DETR-B achieves higher mAP than YOLOv10-B and YOLOv12-B at similar model sizes, with the gap widening on the small object subset (AP-S) where local grid reasoning struggles most.
The specific scenarios where RF-DETR's global attention provides a clear advantage include:
| Feature | YOLO | RF-DETR |
|---|---|---|
| Architecture | CNN (one-stage) | Transformer |
| Anchor-based | Yes (most versions) | No |
| End-to-end training | No | Yes |
| NMS required | Yes | No |
| Reasoning scope | Local (grid-based) | Global (attention-based) |
| Small object performance | Moderate | Strong |
| Tuning complexity | High (anchors, NMS, thresholds) | Low (fewer heuristics) |
| COCO mAP | 55% Peak | 60.5% Peak |
The table makes the tradeoffs concrete. YOLO's design optimizes for speed and simplicity of inference at the cost of reasoning depth. RF-DETR's design optimizes for detection quality and training reproducibility, with inference efficiency and accuracy breaking through the 60% barrier.
RF-DETR is not without its own limitations:
YOLO's speed advantage is real in a narrow context. On CPU inference or highly constrained edge hardware, YOLO models remain competitive and in some configurations will outperform RF-DETR on raw latency. Outside of that context, the gap has closed considerably, consider the low power low-cost GPUs available. RF-DETR variants are now achieving latency figures that are competitive with YOLO at equivalent accuracy levels.
The more useful comparison is not raw speed but accuracy-per-FLOP, which measures how much detection quality a model delivers per unit of compute. On this metric, RF-DETR compares favorably, particularly as model size increases.
The perception that transformers are prohibitively expensive comes from the early days of models like the original DETR, which had slow convergence and high memory requirements. RF-DETR is not that model. Several architectural improvements have significantly reduced the computational cost of transformer-based detection:
The cost is not zero. Training RF-DETR requires more memory than training a comparable YOLO model, and the first deployment setup has a steeper learning curve for teams unfamiliar with transformer architectures. These are real tradeoffs. They are also manageable ones, and the trajectory is clearly toward lower cost over time.
This one requires a careful distinction. YOLO is not simpler to tune, but it does have a more familiar complexity. Deploying YOLO in production requires making deliberate decisions about:
RF-DETR on the other hand has no anchors to configure and no NMS thresholds to tune. The end-to-end training pipeline produces results that are more reproducible across runs and across teams. This does not mean RF-DETR is simpler to understand internally. The attention mechanism and transformer encoder-decoder structure are genuinely more complex under the hood. What it means is that the practical engineering effort required to get reliable results is lower, because there are fewer moving parts to calibrate.
For teams that have spent years building intuition around YOLO's quirks, the switch carries a learning curve. For teams starting fresh or scaling to new domains, RF-DETR's cleaner training interface is a meaningful advantage.
Benchmark numbers and architectural comparisons are useful, but the more important question is practical: where does the accuracy and design advantage of RF-DETR actually show up in production.
RF-DETR's global attention and end-to-end design translate into measurable real-world improvements. They are some of the most common and demanding object detection workloads in production today.
The common thread across these use cases is that they all prioritize detection consistency and accuracy over raw throughput. In production systems, a model that is slightly slower but significantly more reliable is almost always the better operational choice.
These systems require reliable detection of small and partially occluded objects, pedestrians at distance, cyclists partially hidden by vehicles, road signs obscured by weather or angle. Local grid reasoning struggles in exactly these conditions. RF-DETR's global context allows it to use surrounding scene information to localize objects that a YOLO model would miss or misclassify.
In safety-critical systems, that difference is not a marginal improvement, it is the difference between a reliable system and an unreliable one.
Dense shelf environments present a consistent challenge for local detectors. Products overlap, lighting is uneven, and object scales vary significantly within a single frame. RF-DETR handles crowded scenes more cleanly because object queries are designed to predict distinct instances independently, reducing the duplicate detections and missed items that plague grid-based models in these environments.
For a retailer running automated inventory checks across hundreds of locations, detection consistency directly affects operational accuracy. For autonomous warehouse robots, using detection software to locate asset tags to scan can use RF-DETR for the numerous CV tasks.
Robots operating in unstructured environments need to understand not just what objects are present, but how they relate to each other spatially. RF-DETR's attention mechanism builds a richer representation of the full scene, which supports more reliable grasping, navigation, and interaction decisions.
The consistency of RF-DETR's predictions across varied lighting, angles, and clutter is particularly valuable here, where a misdetection does not just affect a metric but causes a physical action to fail.
Object detection in medical imaging, whether identifying anomalies in radiology scans or detecting instruments in surgical video, demands high sensitivity on small and ambiguous targets. The global receptive field that RF-DETR operates with is well-suited to this domain, where local reasoning frequently misses subtle features that only make sense in the context of the surrounding tissue or anatomy.
Beyond current production use cases, the more consequential argument for RF-DETR is its scalability. Transformer-based models scale in ways that CNN-based models do not, and this has been demonstrated repeatedly across computer vision over the past several years.
RF-DETR also aligns directly with where the broader computer vision field is moving. Vision transformers are now the foundation for multimodal models, vision-language systems, and general-purpose perception pipelines. A team investing in RF-DETR today is building on an architecture that connects naturally to these adjacent developments.
The argument for RF-DETR is not that it wins on every individual metric today. On raw CPU latency at the smallest model sizes, YOLO is still competitive. The argument is that RF-DETR delivers better accuracy where accuracy matters most, requires less tuning overhead to achieve reliable results.
Object detection has always advanced by replacing good enough with better. Two-stage detectors gave way to one-stage detectors because better speed. One-stage detectors consolidated around YOLO because it struck the right balance of accuracy, speed, and practicality for the hardware and use cases of the time. That balance made YOLO the standard for over a decade, and it earned that position.
RF-DETR is the computer vision algorithm in the era of AI. Not because it wins on every metric in every context, but because the metrics it wins on are the ones that matter most, the systems and model architecture being built today.
Training AI models on massive datasets can be accelerated exponentially with the right system. It's not just a high-performance computer, but a tool to propel and accelerate your research.
Configure Now